
1.研究所简介
智慧交通与智能控制研究所源于1980年代太阳成集团《自动控制研究所》《智能自动化研究所》,自1998年开始智能交通研究,是国内最早从事该领域研究的团队之一。目前拥有专任教师12人,其中教授3人,副教授6人,青年教师3人,硕博研究生110余名。团队瞄准智能技术发展前沿,紧密结合国家智慧交通与智能制造发展的战略需求,在国家科技部重点研发计划等重大项目支持下,面向新一代交通、智能汽车、智能制造等典型问题,基于人工智能、系统控制理论及信息物理系统(CPS)方法,研究面向传感、计算、通信与控制一体化的智能感知、分析与决策控制的理论和方法以及面向交通、制造行业的智能控制新技术,具备智慧交通与智能控制科学理论研究、微电子集成器件与系统、多源感知与智能控制等领域核心技术研发、产业化应用的完整科研能力。
团队以企业、社会的实际需求为导向,开展智能交通、智能制造、智能物流等领域的科学研究和技术服务,承担完成国家重点研发计划、国家863、国家科技攻关、国家支撑计划、国家自然科学基金、博士点基金、重庆市科技攻关、军工科技项目等科研项目100余项。获国家科技进步二等奖1项、省部科技一等奖4项、二等奖3项、三等奖3项,获中国智能交通协会科学技术奖二等奖1项,在国内外学术期刊发表论文300余篇,申请和获权发明专利200余项。
基于在智能交通、智能制造领域的学术影响力,团队与美国福特、通用等跨国公司及重庆高速、中国汽研、中国空气动力研究与发展中心、重庆铁马工业集团有限公司、重庆红宇精密工业集团有限公司、隆鑫、宗申、川南机械等行业代表性大企业合作,承担企业委托和合作研发重要科技开发项目以及产业化项目100余项,支撑完成了第一个省级区域(重庆)车辆无源电子标识及应用系统,在高速公路异常状态视频监测、高速公路状态感知及趋势分析、公交大数据分析、火工品自动化工艺与系统等领域为企业、社会克服了众多的技术难题,产生了数亿元的经济和社会效益,并在此基础上,形成了一批制造业RFID技术、车辆电子标识及信息采集系统的行业和地方标准。其大量的应用成果得到同行和相关领域的专家,以及政府有关部门的认可和高度评价。
2.主要研究领域及方向
团队瞄准智能技术发展前沿,紧密结合国家智慧交通与智能制造发展的战略需求,基于人工智能、系统控制理论及信息物理系统(CPS)方法,研究面向传感、计算、通信与控制一体化的智能感知、分析与决策控制的理论和方法以及面向交通、制造行业的智能控制新技术。团队的主要研究方向如下:
(1)智能交通系统与智能网联汽车:交通信息物理系统、车路协同与智能驾驶、智能交通系统规划、人车协同与安全驾驶、交通预测与趋势分析。
(2)基于互联网+的智能感知与可信分析:视频检测与智能图像分析、视觉测量与控制、车路感知与状态识别、交通大数据、RFID与物联网技术。
(3)智能制造、装备与物流自动化:微电子集成器件与系统、多源感知与机器人控制、复杂工艺参数智能检测与控制、制造执行系统、制造及物流的状态感知与优化调度。
3.关键/特色技术
(1)新一代智慧交通系统基础理论T-CPS:建立了以CPS为核心的新一代智慧交通系统基础理论T-CPS,首次提出T-CPS的基本架构;提出基于CPS的高速公路车路云协同关键技术,突破复杂艰险山区高速公路车路云协同多源异构感知、数字孪生系统构建、混合交通主动管控难题。
(2)面向特种环境下的智能控制与智能装备:基于特殊条件下的驱动控制要求,研究恶劣条件下的高强度、高可靠性控制技术,开发了新能源汽车驱控、武器装备的测试与控制等装备,形成了共轴刚性某型直升机旋翼操纵台、某型两栖装甲车系列采集控制器某型 HJD 精确制导组件、新能源电动车控制器、新能源电动车驱控一体化减速器某型发动机高度模拟系统、超大量程质量特征测试台等系列产品。
4.重大重点项目支撑
序号 |
项目 |
名称 |
国拨经费 |
负责人 |
1 |
国家重点研发计划项目 |
智能汽车信息物理系统关键技术研究 |
4920 |
孙棣华 |
2 |
国家重点研发计划课题 |
智能汽车信息物理系统融合建模方法研究 |
1000 |
赵敏 |
3 |
科技部国家技术研究发展计划(863计划) |
面向离散制造生产过程管理的RFID技术开发与应用 |
667 |
赵敏 |
4 |
国家重点研发计划子课题 |
智能汽车信息物理系统验证、评估、实现、确认方法研究 |
200 |
林景栋 |
5 |
国家重点研发计划子课题 |
智能汽车信息物理系统全生命周期数字孪生重构设计与系统工程方法研究 |
200 |
程森林 |
6 |
国家重点研发计划子课题 |
智能电动汽车人机共驾交互理论 |
100 |
赵敏 |
7 |
国家重点研发计划子课题 |
混合交通鲜体智能决策与协同控制 理论方法研究 |
86 |
孙棣华 |
8 |
国家自然科学基金面上项目 |
带液芯铸坯超声传输特征及凝固坯壳厚度传感机理研究 |
85 |
欧阳奇 |
9 |
国家自然科学基金面上项目 |
v2x环境下近信号控制区车辆行驶的信息物理融合机制研究 |
77.8 |
孙棣华 |
10 |
国家自然科学基金面上项目 |
隧道入口区域混合交通车辆信息物理建模与协同控制研究 |
54 |
赵敏 |
11 |
国家自然科学基金面上项目 |
近信号控制区混合交通的信息物理建模与群体智能控制研究 |
70.26 |
孙棣华 |
12 |
重庆市技术创新与应用发展专项重大项目 |
智能网联汽车安全可靠性综合测试评价方法和系统开发 |
70 |
林景栋 |
13 |
中国工程科技发展战略重庆研究院咨询项目 |
重庆东站智慧综合交通枢纽数据 采集机制研究 |
40 |
赵敏 |
14 |
重庆市科委重大专项 |
基于多源异构数的高速公路交通异常感知及管控决策技术研发与示范应用 |
80 |
孙棣华 |
15 |
重庆市“151“科技重大专项 |
车辆互联环境下的道路交通运行状态 感知与分析 |
70 |
赵敏 |
16 |
重庆市技术创新与应用发展专项重点项目 |
山区高速公路建管养运智慧化提升关键技术研究与应用 |
60 |
孙棣华 |
17 |
中国兵器工业集团256厂 |
系列车辆采集控制器 |
250 |
欧阳奇 |
18 |
横向科研项目自然科类 |
抚顺隆烨绕线扎把自动装配生产线开发 |
100 |
林景栋 |
19 |
中国人民解放军某部队 |
某型发动机进气模拟控制系统 |
203 |
欧阳奇 |
20 |
横向科研项目 |
智能污水处理投加系统策略与分析控制,曝气系统策略与分析控制 |
49.8 |
林景栋 |
5.研究所支撑平台
(1)智慧交通与智能控制研究所依托信息物理社会(CPS)可信服务计算教育部重点实验室、重庆市交通物联网工程技术研究中心、重庆市智能交通工程技术研究中心、重庆自主品牌汽车协同创新中心(国家2011计划)、重庆璧山先进技术研究院等,以企业、社会的实际需求为导向,开展智能交通系统与智能网联汽车等方向的科学研究和技术服务,是中国智能车路协同技术创新产业联盟成员。团队拥有福特汽车智能实验平台、协同驾驶信息物理融合实验系统、车车协同仿真、电源研发、集成电路设计、嵌入式软件测试和巡检机器人研发等实验研究平台。
 |
 |
 |
 |
 |
 |
| 人机共驾实验平台 | 车路云一体化CPS实验平台 |
 |
 |
| 缩微车实验平台 | 移动机器人平台 |
(2)团队与美国福特、通用等跨国公司及重庆高速、中国汽研、中国空气动力研究与发展中心、重庆铁马工业集团有限公司、重庆红宇精密工业集团有限公司、隆鑫、宗申、川南机械等行业代表性大企业建立了长期合作关系并成立了联合教学实验基地,为产学研结合、专业型硕士研究生的专业实习等创造了良好的实践平台。

6.主要研究成果
获奖名称 |
获奖等级 |
高精度高能大型工业CT无损检测系统研制及应用 |
国家科技进步二等奖 |
城市交通计算机集成管理及控制系统 |
中国高校科学技术奖 (教育部科技进步奖)一等奖 |
制造系统工程的理论框架和技术体系 |
教育部高等学校科学技术奖 (自然科学奖)一等奖 |
基于RFID的离散制造业生产管理关键技术及应用 |
重庆市科技进步奖二等奖 |
基于智能对象的敏捷生产管理技术及应用 |
高等学校科学研究优秀成果奖 科技进步奖二等奖 |
公路网交通运行状态分析评估与预测技术研究 |
中国智能交通协会科技进步奖 |
摩托车行业第三方供应链协同商服务平台 |
中国产学研合作创新成果奖 |
  |
 |
 |
 |
 |
 |
7.成果推广及产业化应用
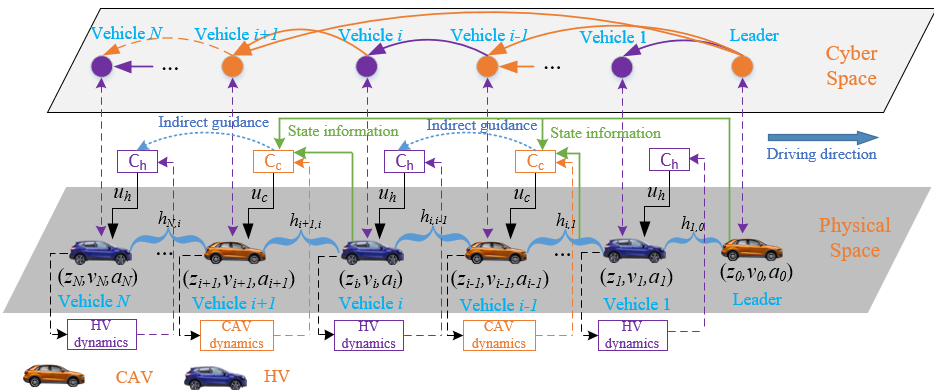
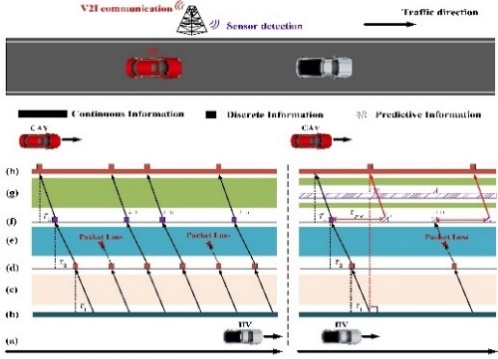
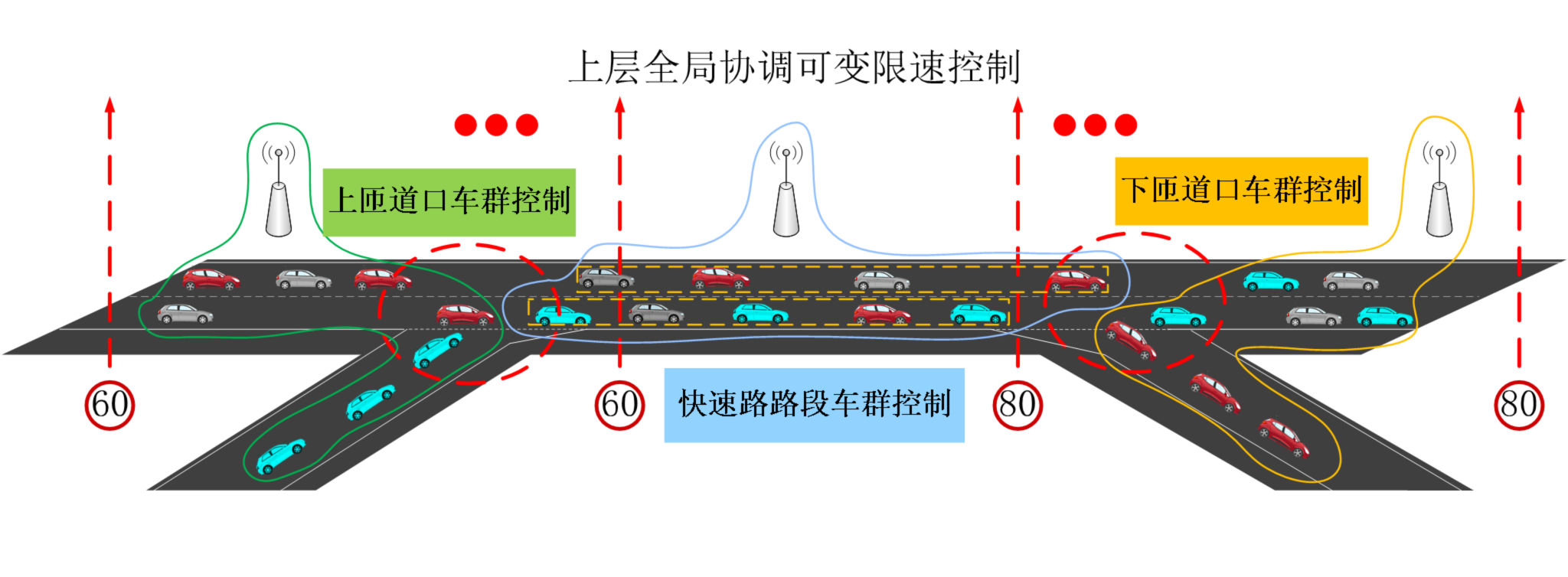
(1)CPS下的混合交通群体控制:在交通信息物理系统的框架下,考虑新型混合交通异质特性,建立混合车群动态行为演化规律刻画方法,研究异质车辆多车协同行驶优化控制方法和协同控制策略,依托智慧公路建设,探索混合交通场景下汇流安全, 通行效率, 瓶颈优化, 节能减排等问题的解决途径。
 |
 |
|
|
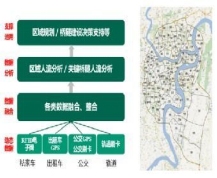
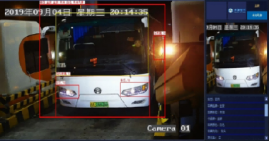
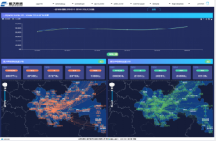
(2)CPS交通大数据:面对城市交通复杂的路网、交通状况和个性化出行需求,基于车联网和大数据,探索人车路混合集成的交通表征、数据采集、状态辨识和预测技术,结合重庆高速公路监控、智能交通应用示范工程的建设,开展交通大数据产品的开发与应用示范,为个性化出行决策和城市公共出行的优化调度服务。
|
|
|
|

(3)智能机器人研发
①电力巡检机器人
智能巡检机器人系统是针对各种等级变电所无人值守变电站发展需求而研发的代替人工进行巡检任务的机器人智能自动巡检系统。
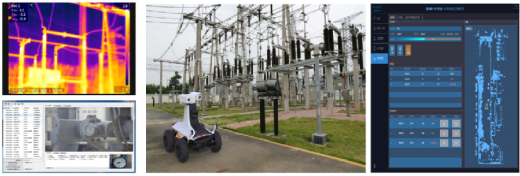
②库房巡查机器人
采用国际先进的Mecanum轮搭建移动平台,能够原地零半径转动及各方位平移,便于在狭窄区域灵活运动。集高精度的激光雷达、计算机视觉、增量式编码器、超声波等传感手段于一体,以实现在狭小、复杂、未知的环境下智能平台的自主导航,完成自主巡检的任务。

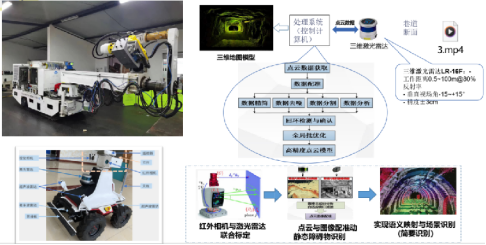
③煤矿井下锚喷机器人
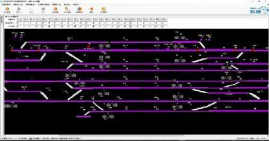
(4)铁路信号系统分布式巡检控制器
①对铁路信号系统信号机、道岔、接口柜、轨道铁路模块的信号进行巡检。
|
|

②铁路信号系统级联合工装仪器

③无人系统底盘控制器(车身、车架、悬挂、乘员舱、动力舱、开关面板)
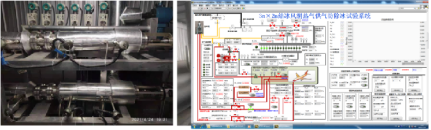
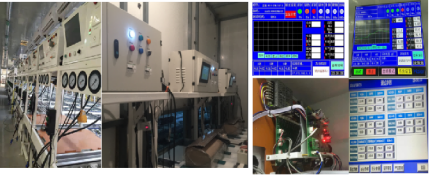
④高温大流量高精度流量控制器及系统:耐高温450℃,流量范围1.6Kg/s,精度0.3%,流体介质:空气,耐压1.5MPa。
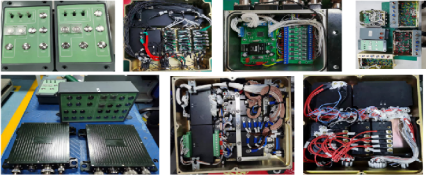
 (5)特种环境下的采集控制器-整车控制器、驱控集成器件、多轴液压控制器
(5)特种环境下的采集控制器-整车控制器、驱控集成器件、多轴液压控制器

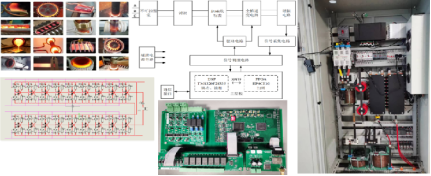
(6)超高频感应电源
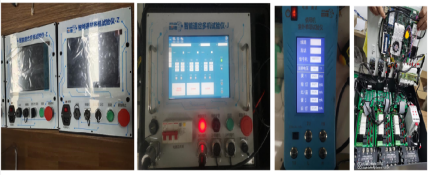
(7)智能道岔多机试验仪:研制了智能道岔试验仪样机(含手持信号机、智能道岔多机试验仪-J、智能道岔多机试验仪-Z)。依据现有国铁、高铁、客专、城市轨道交通道岔转辙机应用及控制方式,开发出一种能覆盖国铁、高铁、客专、城市轨道交通等道岔转辙机试验场景的通用试验仪。
(8)空调内外机综合性能参数采集控制器及系统
(9)空调生产线视觉控制器及机器人自动组装系统:通过视觉引导机器人抓取和安装压机。涉及技术:无标定人眼协调和机器人伺服控制、PLC控制技术与组态控制技术。实现压缩机视觉引导机器人抓取及装配,抓取率99.9%,装配失误率小于0.1%。
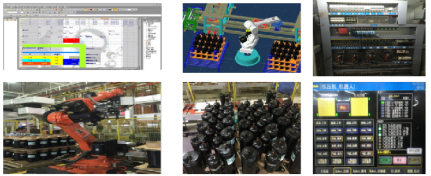
(10)复杂环境下视觉控制器及机器人卸料系统

(11)电子雷管生产线
|
|


(12)智能污水处理

8.国际化交流情况
(1)2020年9月9日重庆市委书记陈敏尔在太阳成集团党委书记舒立春和董事长张宗益陪同下到实验室考察,团队负责人孙棣华教授向领导们介绍团队发展和研究情况。

(2)2014年10月,智能自动化团队带头人孙棣华教授带领T-CPS研究团队出席ITSC 2014国际会议并作学术报告,且作为特邀嘉宾参与了在浙江大学举行的高层学术探讨。
|
|


(3)2015年12月10日,首届智能车路协同技术创新产业联盟交流暨研讨会在江门举行。太阳集团电子游戏的智能自动化团队受邀加入智能车路协同技术创新产业联盟。
|
|


(4)2016年2月26日,受太阳集团电子游戏智能自动化团队孙棣华教授邀请,清华大学姚丹亚教授在公司信息物理社会可信服务教育部重点实验室进行了题为《智能车路协同关键技术研究》的学术报告讲座。
|
|


(5)2016年6月21日,“第二届智能车路协同技术创新产业联盟研讨会”在北京清华大学中央主楼召开。太阳集团电子游戏智能自动化团队孙棣华教授应邀出席并作了题为“走向人车路协同的智慧交通——交通信息物理系统”的大会报告。
|
|


(6)2016年11月17日,智能自动化团队带头人孙棣华教授在水路交通智能化论坛上做了题为“物联网时代的智慧航运——航运信息物理系统”主题报告。同日,在智能网联汽车技术发展论坛上做了题为“交通大数据:理念与实践”主题报告。
|
|


(7)2016年12月28日,国航股份西南分公司科技办组织各单位科技项目研发人员一行21人,来公司开展了科技创新交流活动。智能自动化团队带头人孙棣华教授向来访嘉宾介绍了车车协同驾驶平台和RFID物流跟踪系统平台。
|
|


9.主要负责人及研究所联系方式
(1)研究所负责人介绍

团队负责人:赵敏
博士,教授
博士生导师。
重庆市交通物联网工程技术研究中心主任助理,“信息物理社会可信服务计算教育部重点实验室(太阳成集团)”技术骨干,承担国家自然科学基金、国家重点研发计划、国家支撑计划、中国工程院咨询研究项目、重庆市科委重点项目以及企业委托项目30余项。发表SCI/EI论文30余篇,申请发明专利100余项,已获权80余项。获得教育部以及重庆市科技进步奖、中国智能交通协会科学技术进步奖二等奖各1项;主编制定中华人民共和国电子行业标准2项以及重庆市交通行业标准1项。
(2)研究所主要联系方式
赵敏:zhaomin@cqu.edu.cn
td width主要联系人

